
Un robot est un dispositif mécatronique (alliant mécanique, électronique et informatique) conçu pour accomplir automatiquement des tâches imitant ou reproduisant, dans un domaine précis, des actions humaines. La conception de ces systèmes est l’objet d’une discipline scientifique, branche de l’automatisme nommé robotique.
Le terme robot apparaît pour la première fois dans la pièce de théâtre (science-fiction) R. U. R. (Rossum’s Universal Robots), écrite en 1920 par l’auteur Karel Čapek. Le mot a été créé par son frère Josef à partir du mot tchèque « robota » qui signifie « travail, besogne, corvée ».
Les premiers robots industriels apparaissent, malgré leur coût élevé, au début des années 1970. Ils sont destinés à exécuter certaines tâches répétitives, éprouvantes ou toxiques pour un opérateur humain : peinture ou soudage des carrosseries automobiles. Aujourd’hui, l’évolution de l’électronique et de l’informatique permet de développer des robots plus précis, plus rapides ou avec une meilleure autonomie. Industriels, militaires ou spécialistes chirurgicaux rivalisent d’inventivité pour mettre au point des robots assistants les aidant dans la réalisation de tâches délicates ou dangereuses. Dans le même temps apparaissent des robots à usages domestiques : aspirateur, tondeuses, etc.
L’usage du terme « robot » s’est galvaudé pour prendre des sens plus larges : automate distributeur, dispositif électro-mécanique de forme humaine ou animale, logiciel servant d’adversaire sur les plateformes de jeu, bot informatique.

Étymologie
Le terme robot est issu des langues slaves et formé à partir du radical rabot, rabota (работа en russe) qui signifie travail, corvée que l’on retrouve dans le mot Rab (раб), esclave en russe. Ce radical présent dans les autres langues slaves (ex. : travailleur = robotnik en polonais, работнік en biélorusse, pracovník en tchèque) provient de l’indo-européen *orbho- qui a également donné naissance au gotique arbais signifiant besoin, nécessité, lui-même source de l’allemand Arbeit, travail.
Il fut initialement utilisé par l’écrivain tchécoslovaque Karel Čapek dans sa pièce de théâtre R. U. R. (Rossum’s Universal Robots), écrite en 1920. Cette pièce fut jouée pour la première fois en public au Théâtre national à Prague le 25 janvier 1921. Bien que Karel Čapek soit souvent considéré comme l’inventeur du mot, il a lui-même désigné son frère Josef, peintre et écrivain, comme étant l’inventeur réel du terme.
Ainsi certains assurent que le mot robot fut d’abord utilisé dans la courte pièce Opilec de Josef Čapek (The Drunkard), publiée dans la collection Lelio en 1917. Selon la Société des frères Čapek à Prague, ce serait néanmoins inexact. Le mot employé dans Opilec est automate, alors que c’est bien dans R.U.R. que le mot robot est apparu pour la première fois.
Alors que les « robots » de Karel Čapek étaient des humains organiques artificiels, le mot robot fut emprunté pour désigner des humains « mécaniques ». Le terme androïde peut signifier l’un ou l’autre, alors que le terme cyborg (« organisme cybernétique » ou « homme bionique ») désigne une créature faite de parties organiques et artificielles.
Quant au terme robotique, il fut introduit dans la littérature en 1942 par Isaac Asimov dans son livre Runaround. Il y énonce les « trois règles de la robotique » qui deviendront, par la suite, dans les œuvres de sciences fiction les Trois lois de la robotique.
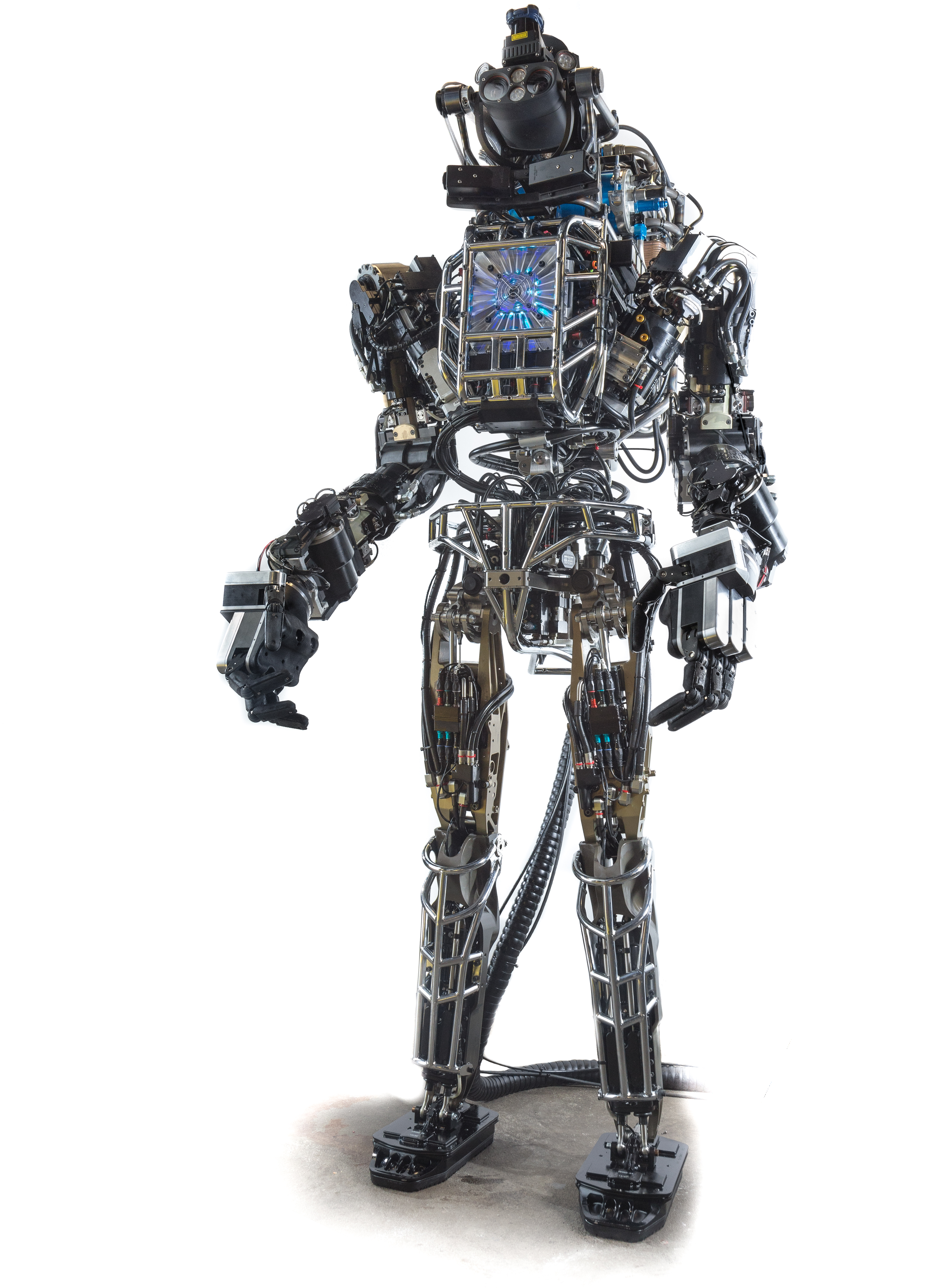
Atlas (2013), robot androîde de Boston Dynamics
Composition d’un robot
Un robot est un assemblage complexe de pièces mécaniques, électro-mécanique ou pièces électroniques. L’ensemble est piloté par une unité centrale appelée « système embarqué » : une simple séquence d’automatisme, un logiciel informatique ou une intelligence artificielle suivant le degré de complexité des tâches à accomplir. Lorsque les robots autonomes sont mobiles, ils possèdent également une source d’énergie embarquée : généralement une batterie d’accumulateurs électriques ou un générateur électrique couplé à un moteur à essence pour les plus énergivore.

Bras manipulateurs dans un laboratoire (2009)

NAO (2006), robot humanoîde éducatif d’Aldebaran Robotics
Les capteurs
Les principales sortes de capteurs sont :
- Les sondeurs (ou télémètres) à ultrason ou Laser. Ces derniers sont à la base des scanners laser permettant à l’unité centrale du robot de prendre « conscience » de son environnement en 3D.
- Les caméras sont les yeux des robots. Il en faut au moins deux pour permettre la vision en trois dimensions. Le traitement automatique des images pour y détecter les formes, les objets, voire les visages, demande en général un traitement matériel car les microprocesseurs embarqués ne sont pas assez puissants pour le réaliser.
- Les roues codeuses permettent au robot se déplaçant sur roues, des mesures de déplacement précises en calculant les angles de rotation (information proprioceptive).
Les circuits électroniques
Les microprocesseurs ou les microcontrôleurs sont des éléments essentiel du système de pilotage d’un robot. Ils permettent l’exécution de séquences d’instruction ou de logiciels commandant la réalisation d’actions ou de fonctions du robot. On trouve souvent, dans les robots de petite taille, des composants à très faible consommation électrique, car ils ne peuvent emporter que des sources d’énergie limitées.
Les actionneurs
Les actionneurs les plus communs sont :
- des moteurs électriques rotatifs, qui sont fréquemment associés à des réducteurs mécaniques à engrenages.
- des vérins pneumatique, plus rarement hydraulique, alimentés par une pompe et permettant des actions toniques.
Un actionneur est le constituant d’un système mécanique (exemple : bras, patte, roue motrice…) réalisant une action motrice suivant un degré de liberté. Il anime les interfaces haptiques réalisant les actions de saisies d’objets dans les applications de télémanipulation.
Adaptation à son environnement
Une certaine capacité d’adaptation à un environnement inconnu peut, dans les systèmes semi-autonomes actuels, être assurée pourvu que l’inconnu reste relativement prévisible : l’exemple déjà opérationnel du robot aspirateur en est une bonne illustration : le logiciel qui pilote cet appareil est en mesure de réagir aux obstacles qui peuvent se rencontrer dans une habitation, de les contourner, de les mémoriser. Il sauvegarde le plan de l’appartement et peut le modifier en cas de besoin. Il retourne en fin de programme se connecter à son chargeur. Il doit donc fournir une réponse correcte au plus grand nombre possible de stimulations, qui sont autant de données entrées, non par un opérateur, mais par l’environnement.
L’autonomie suppose que le programme d’instructions prévoit la survenue de certains événements, puis la ou les réactions appropriées à ceux-ci. Lorsque l’aspirateur évite un buffet parce qu’il sait que le buffet est là, il exécute un programme intégrant ce buffet, par exemple les coordonnées X-Y de son emplacement. Si ce buffet est déplacé ou supprimé, le robot est capable de modifier son plan en conséquence et de traiter une zone du sol qu’il ne prenait pas en compte jusqu’alors.

DER1 (2005), un actroïde d’accueil

Historique
Aux origines de la robotique
Les ancêtres des robots sont les automates.
Le premier automate est le pigeon volant d’Archytas de Tarente aux alentours de 400 av.J.-C. Un automate très évolué fut présenté par Jacques de Vaucanson en 1738 : il représentait un homme jouant d’un instrument de musique à vent. Jacques de Vaucanson créa également un automate représentant un canard mangeant et refoulant sa nourriture après ingestion de cette dernière.
Les premiers robots
Unimate est le premier robot industriel créé. Il fut intégré aux lignes d’assemblage de General Motors en 1961.
En 1970, le robot lunaire Lunokhod 1, envoyé par l’Union soviétique, a voyagé sur une distance de 10 km et a transmis plus de 20 000 images.
Le premier robot citoyen

Le robot Sophia à l’Union Internationale des Télécommunications, Genève, 2018
Le 25 octobre 2017 Sophia est le premier robot à avoir une nationalité. Avec l’obtention de la nationalité saoudienne. Cela a suscité la controverse, car il n’est pas évident de savoir si cela implique que Sophia peut voter ou se marier, ou si un arrêt délibéré du système peut être considéré comme un meurtre.
Usages
La robotique possède de nombreux domaines d’application. Les robots ont été installés dans les industries, ce qui permet de faire des tâches répétitives avec une précision constante. À la suite de l’évolution des techniques on retrouve des robots dans des secteurs de pointe tels que le spatial, médecine, chez les militaires.
Depuis quelques années on les retrouve même à domicile.
Dans la culture
L’image d’êtres automatisés est ancienne, des traces étant présentes dès l’Antiquité gréco-romaine. Pour autant, le sujet a largement évolué, allant du mythe de la création d’êtres humains par les hommes à la prise de pouvoir de ces êtres artificiels, et allant de l’utilisation des matériaux basiques (boue, morceaux humains) à l’utilisation des techniques et sciences modernes. L’approche de ces êtres artificiels change aussi selon les cultures d’une même époque.

Robots en conversation au musée des Arts et Métiers de Paris.
Dans l’Antiquité
Le mythe de Pygmalion racontait déjà dans l’Antiquité comment la statue Galatée devint vivante et s’affranchit de son créateur afin de partir à la conquête du monde des hommes, la « Fonostra ». Il ne s’agit toutefois pas d’un robot au sens propre du terme, puisque Galatée n’a pas été conçue pour être autonome. Son autonomie est le fruit de la volonté divine, et non de celle de son créateur ; elle ne dépend ni de l’intelligence de celui-ci, ni des mécanismes (inexistants) qui la composent.
À la Renaissance
Le premier exemple d’un robot de forme humaine fut donné par Léonard de Vinci en 1495. Ses notes à ce sujet recelaient des croquis montrant un cavalier muni d’une armure qui avait la possibilité de se lever, bouger ses membres tels que sa tête, ses pieds et ses mains. Le plan était probablement basé sur ses recherches anatomiques compilées dans l’homme vitruvien. On ne sait pas s’il a tenté de construire ce robot.
Au XIXe siècle
Lorsque la technologie arriva au point où l’on put préfigurer des créatures mécaniques, les réponses littéraires au concept de robot suscitèrent la crainte que les humains soient remplacés par leurs propres créations.
Frankenstein (1818), parfois désigné comme le premier roman de science-fiction, est devenu un synonyme de ce thème. Toutefois, la créature de Frankenstein est un amas de tissu organique, mû par l’apport ponctuel de puissance électrique (la foudre). Le robot n’est pas encore apparu comme tel.
La nouvelle L’Homme épingle d’Hermann Mac Coolish Rotenberg Caistria (1809) raconte l’histoire d’un homme qui désirait se transformer en robot par amour pour sa machine à coudre, et Steam Man of the Prairies d’Edward S. Ellis (1865) exprime la fascination américaine de l’industrialisation. La littérature concernant la robotique connut des sommets notables avec l’Homme électrique de Luis Senarens en 1885.
En France, le roman L’Ève future de Villiers de L’isle-Adam en 1883 tourne autour de la figure moderne du robot : création métallique, mobile par électricité, et autonome. Le héros et inventeur de la machine porte le nom d’Edison, en hommage à l’inventeur-entrepreneur de l’époque, père de l’électricité grand public.
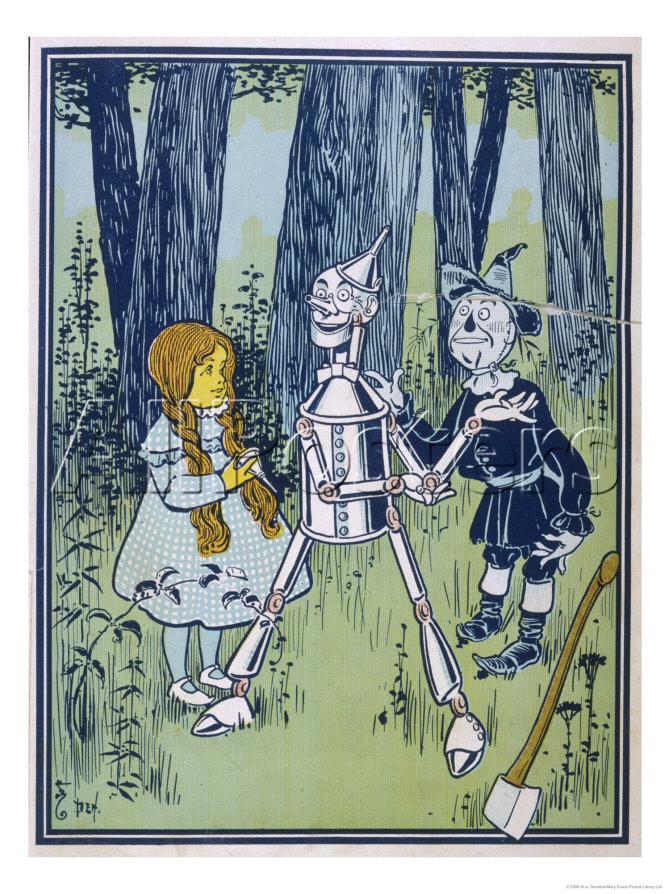
En 1900, la littérature enfantine et les illustrations de W.W. Denslow laissent apparaître dans Le_Magicien_d’Oz un bûcheron de fer-blanc comme un robot.
Au XXe siècle
En littérature

Le mot robot est créé par Karel Čapek, dans sa pièce de théâtre : R. U. R. (Rossum’s Universal Robots), mise en scène à Prague en 1921. Dans une petite île, un industriel humain a créé une chaîne de montages d’où sortent des serviteurs de métal, pour être envoyés partout dans le monde. Les robots se révolteront, prenant le contrôle de leur chaîne de montage, et chercheront à construire toujours plus de robots.
Le thème prit donc une consonance économique et philosophique.
La littérature de science-fiction ou de bande dessinée autour du thème des robots est foisonnante. Un certain nombre d’auteurs (essentiellement de science-fiction, et parfois ayant une réelle connaissance scientifique du sujet tel Isaac Asimov) ont donné une place particulière aux robots dans leurs ouvrages. Isaac Asimov est le premier à utiliser le mot robotique en 1941. Dans ses nombreux romans où apparaissent des robots (regroupés dans Le Grand Livre des robots), il s’intéressa tout particulièrement à leur interaction avec la société et à la manière dont cette dernière les accepte. Certains de ces romans ont d’ailleurs fait l’objet d’une adaptation cinématographique. Exemples :
- Isaac Asimov (Qui est également l’inventeur de la notion de robotique avant même que cette science ne soit reconnue)
- Les Robots, 1967 ((en) I, Robot, 1950), trad. Pierre Billon (ISBN 978-2-290-34248-0, 2-290-31290-8, 2-277-13453-8 et 2-277-12453-2)
- Un défilé de robots, 1967 ((en) The Rest of the Robots, 1964), trad. Pierre Billon (ISBN 978-2-277-12542-6 et 2-290-31125-1)
- Nous les robots, 1982 ((en) The Complete robot, 1982) (ISBN 2-258-03291-1)
- Le Robot qui rêvait, 1988 ((en) Robot Dreams, 1986), trad. France-Marie Watkins (ISBN 978-2-277-22388-7 et 2-290-31715-2)
- Les Cavernes d’acier, 1956 ((en) The Caves of Steel, 1953), trad. Jacques Brécard (ISBN 978-2-277-12404-7 et 2-290-32794-8)
- Face aux feux du soleil, 1961 ((en) The Naked Sun, 1956), trad. André-Yves Richard (ISBN 978-2-277-12468-9 et 2-290-32794-8)
- Les Robots de l’aube, 1984 ((en) Robots of Dawn, 1983), trad. France-Marie Watkins (ISBN 2-290-33275-5)
- Les Robots et l’Empire, 1986 ((en) Robots and Empire, 1985), trad. Jean-Paul Martin (ISBN 978-2-277-21996-5, 2-277-21996-7 et 2-290-31116-2)
- Douglas Adams
- Le Guide du voyageur galactique, 1982 ((en) The Hitchhiker’s Guide to the Galaxy, 1979), trad. Jean Bonnefoy, avec Marvin, son robot dépressif (ISBN 2-207-30340-3).
- Philip K. Dick avec Le Grand O, James P. Crow, Service avant achat, Au service du maître, L’Ancien Combattant, Le Canon, Autofab (présence d’I.A.), Nanny, La Fourmi électrique, Nouveau Modèle, L’Imposteur, Progéniture…
- Les androïdes rêvent-ils de moutons électriques ?, 1976 ((en) Do Androids Dream of Electric Sheep ?, 1968), trad. Serge Quadruppani qui a inspiré le film Blade Runner (ISBN 2-85184-066-5).
- Fredric Brown
- Deuxième chance, dans le recueil Fantômes et Farfafouilles (ISBN 2-207-30065-X).

- Stanislas Lem
- Le Bréviaire des robots, Denoël, coll. Présence du futur n° 96, 1967 ((pl) , 1961), trad. Halina Sadowska (ISBN 2-07-034105-4)
- Contes inoxydables, Denoël, coll. Présence du futur n° 330, 1981 ((pl) Bajki robotów, 1964), trad. Dominique Sila (ISBN 2-207-50330-5)
- Pierre Boulle
- Le Parfait Robot, dans le recueil Contes de l’absurde (ISBN 2-266-00609-6).
- Jean-Pierre Andrevon dans de nombreuses nouvelles.
- Enrico Grassani, Automi. Passato, presente e futuro di una nuova « specie », Editoriale Delfino, Milano 2017, (ISBN 978-88-97323-66-2)
Au cinéma
Les robots sont présents dans de nombreuses œuvres cinématographiques. Ces robots peuvent être des ennemis de l’Homme (par exemple dans Terminator), parfois trop intelligents pour rester des serviteurs (2001, l’Odyssée de l’espace, Blade Runner). Ces robots peuvent pourtant aussi être foncièrement bons, comme le sont R2-D2 et C-3PO dans Star Wars (1977), ou les robots de L’Homme bicentenaire et I, Robot (deux films adaptés de nouvelles d’Isaac Asimov).
Citons aussi le film classique Metropolis (1927). Mais également Short Circuit, Matrix (les sentinelles), WALL-E, Robots, Transformers.
Les protagonistes sont dans Robots (film, 2005).
Un androïde dans Enthiran.
La robotique dans Robots (film, 1988) (en).
Dans Runaway : L’Évadé du futur il y a un futur avec des robots.
Le robot géant dans The Mechanical Man (en).
Des robots sont présent comme le ED-209 dans RoboCop.
David qui est un enfant androïde dans A.I. Intelligence artificielle.
La femme androïde dans Ex machina (film).
Des robots deviennent incontrôlable dans Shopping (film, 1986).
Dans le film « Automatic » de 1995, il y a un androïde héroïque joué par Olivier Gruner.
Un androïde nommé Solo dans Le Guerrier d’acier.
Dans Robosapien: Rebooted il y a un Robosapien qui est ami avec un môme nommé Henry.
Dans la culture populaire
Plusieurs séries télévisées comportent un certain nombre de robots ou d’androïdes. On peut ainsi citer les Réplicateurs de Stargate SG-1, les Cybermen de Doctor Who, les hubots de Real Humans (Äkta människor), ou encore les Cylons de Battlestar Galactica. Dans chaque univers, le robot a une place différente. Ainsi, les hubots de Real Humans ont découvert la notion de liberté de pensée et veulent s’affranchir des humains, tandis que les robots de la série Futurama vivent au sein même de leur société sans relation d’infériorité.
Il existe aussi des mangas traitant le sujet (Astro, le petit robot, Dragon Ball Z, Medabots) ainsi que de nombreux jeux vidéo (Megaman, Sonic the hedgehog).
Enfin, la série Il était une fois… l’Espace en présente de nombreux, soit hostiles soit grandement utiles. Leur présence permet de réfléchir en profondeur sur le libre-arbitre et la volonté d’indépendance.
Des robots qui vivent avec des humains dans Cubix.
Dans Zentrix, il y a des robots artificiels dans les combats.
Dans Mon robot et moi , il y a des écoliers avec des robots.
Dans Anatane et les enfants d’Okura les robots enlèvent des jeunes hommes masculins pour les zombifier soit les changer en criminel de guerre.
Des robots Faro dans le jeu vidéo Horizon Zero Dawn.
Des androïdes, appelés « hôtes » (hosts) dans Westworld (série télévisée).
Dans Le Maître des bots, il y a des robots intelligents comme des humains.
Bot informatique
Un bot informatique est un agent logiciel automatique ou semi-automatique qui interagit avec des serveurs informatiques. Un bot se connecte et interagit avec le serveur comme un programme client utilisé par un humain, d’où le terme « bot », qui est la contraction par aphérèse de « robot ».
Selon Andrew Leonard, un bot est « un programme informatique autonome supposé intelligent, doué de personnalité, et qui habituellement, mais pas toujours, rend un service ». Le terme « personnalité » est justifié par l’auteur par l’anthropomorphisme plus ou moins prononcé dont le bot est l’objet. La supposée intelligence du bot renvoie à la notion d’intelligence artificielle proposée par Marvin Minsky et qui consiste à « fabriquer des machines qui font des choses qui, accomplies par l’homme, demanderaient de l’intelligence ». Le (ou les) programmeur(s) du bot ont donc bien conscience de l’absence d’intelligence humaine pour leur bot, alors que les autres humains, comme les internautes, ne sont pas nécessairement dans ce cas.
Il existe une taxonomie proposée par Stan Franklin et Art Graesser qui situe les bots dans la famille des agents autonomes artificiels. Les bots sont développés principalement pour effectuer des tâches répétitives. Ils sont également utiles lorsque la rapidité d’action est un critère important, avec par exemple les robots de jeu, les robots d’enchères, mais aussi pour simuler des réactions humaines, comme avec les bots de messagerie instantanée. À l’origine, les bots sont préférés aux humains pour les soulager de tâches automatisables mais également parce que leurs capacités sont supérieures sur les tâches qui leur sont données.
Web
Les robots d’indexation, tels que le Googlebot, sont la principale utilisation des robots informatiques. Ils parcourent le web en indexant les pages pour le compte de moteurs de recherche.
Dans le cas d’un wiki, les bots sont utilisés pour remplir des tâches systématiques comme corriger des fautes d’orthographe courantes, générer du contenu en suivant un template, maintenir la cohérence des liens, détecter les contributions douteuses, etc. Le logiciel wiki peut offrir des pages spécialement conçues pour les bots afin qu’ils puissent agir plus rapidement en chargeant un peu moins les serveurs.
Les bots sont souvent utilisés dans les sites de rencontres afin de simuler l’existence de vraies personnes sur ces sites.
Messagerie instantanée et IRC
Les bots de messagerie instantanée existaient déjà au début des années 1990, notamment sur IRC. Ils peuvent proposer des jeux, tenir des statistiques, gérer un canal de discussion, etc. Souvent, ils sont programmés pour donner un statut privilégié à certains utilisateurs. Depuis 2016, les bots ou dialogueurs reviennent à la mode grâce aux travaux en matière d’intelligence artificielle qui leur donnent une nouvelle vie.
Robots de jeu
Dans le cadre de jeux vidéo, les bots sont des adversaires artificiels qui miment le comportement de vrais joueurs, pilotés par l’ordinateur, permettant ainsi de jouer seul à un jeu multijoueur.
Il existe également des bots d’assistance, permettant d’assister le joueur dans les manipulations demandant de la précision ou de la rapidité. Par exemple, dans un jeu de tir à la première personne, un bot permettra d’ajuster automatiquement la visée afin de faire mouche à chaque coup.
Ce genre de bot est généralement considéré comme de la triche, et peut sanctionner leurs utilisateurs d’un bannissement.
Il existe également des bots d’aide à l’administration de serveurs de jeux vidéo, tel que le Big Brother Bot. Ces robots ne constituent en aucun cas des joueurs artificiels.
Utilisation malveillante
Des chercheurs comme Silvia Lombardo (chercheuse indépendante en Italie) ont proposé l’idée que l’humanité entre dans une nouvelle ère : le « Robocène » (où les robots sont physiques, mais aussi des bots informatiques). La dénomination de « Bad Bot » a été proposée pour désigner les bots créés pour des usages malveillants, tels que par exemple :
- attaque distribuée, conduite par des bots contre des services internet : voir Botnet.
- « pollution » de forums de discussion dans le but de spammer, jouer le rôle de trolls, diffuser des théories du complot, tenter de rediriger les internautes, usagers de twitter ou de Facebook, etc. vers une publicité, de la propagande, un site concurrent et/ou malveillant. Les commentaires déposés par ces bots sont souvent trouvé dans les sections de commentaires ou les forums de divers sites Web : voir ‘spambots ;
- fraude au clic : voir webbots ;
- augmentation truquée du nombre de vues de pages internet ou de vidéos (par exemple sur YouTube) ;
- Influence psychologique, au service de la publicité et de la propagande politique. Il ne s’agit pas de science-fiction ; des bots créés et gérés à partir d’une Intelligence artificielle (IA) ont déjà été utilisés en politique, par exemple pour, à partir de centaines de millions de données personnelles ou désanonymisées et/ou agrégées (ce qui est interdit en Europe par le RGPD) ou issues de la fouille du Big data ou volées sur les compte-facebook privés, secrètement influencer les votes. Des plate-formes logicielles comme « Ripon » ont été révélées par le scandale Facebook-Cambridge Analytica/AggregateIQ. Dans ce cas, des groupes conservateurs et libertariens de droite ont payé le Groupe SCL et Cambridge Analytica pour créer et utiliser ‘Ripon (crée par AggregateIQ) pour truquer d’une nouvelle manière, les votes, en influençant artificiellement les émotions et par suite les comportements et choix de vote des électeurs, sans leur consentement, et sans qu’ils aient conscience d’avoir été manipulés. Le même outil était utilisé pour inciter à l’abstention des électeurs classé par le logiciel comme n’étant pas prêt à changer d’avis.
En 2018, des enquêtes et révélations de lanceurs d’alerte ont montré que des utilisations massives de propagande politique et de désinformations par des bots, associés à des trolls humains (Usine à trolls éventuellement) ou animés par une IA ont été pratiquées dans les années 2010 pour artificiellement améliorer les scores de votes en faveur de Ted Cruz, Ben Carson, Donald Trump aux USA, et en faveur du Brexit au Royaume-Uni (pour ne citer que les exemples les plus médiatisés). Cette nouvelle méthode d’influence semble avoir été initialement principalement encouragée et lourdement financée respectivement par Steve Bannon et la famille proche du milliardaire Robert Mercer pour faire avancer les idées du libertarianisme de droite et faire advenir le Brexit en influençant le cours du Référendum sur l’appartenance du Royaume-Uni à l’Union européenne.
Selon Silvia Lombardo, ce type de bots, générateurs de « deepfakes » (« hypertrucages ») et d’une vérité troublée par la diffusion à large échelle de faits alternatifs (parfois appuyés par des hypertrucages), pourrait conduire, ou conduit déjà depuis le milieu des années 2010 au développement de politiques populistes, et à un avenir plus dystopique. Le Gouvernement russe est soupçonné d’utiliser des bots et des fermes de trolls pour déstabiliser de nombreux autres pays.
Mécatronique
La mécatronique est la combinaison synergique et systémique de la mécanique, de l’électronique, de l’automatique et de l’informatique en temps réel. L’intérêt de ce domaine d’ingénierie interdisciplinaire est de concevoir des systèmes automatiques puissants et de permettre le contrôle de systèmes complexes.
Le terme mechatronics a été introduit par un ingénieur de la compagnie japonaise « Yaskawa Electric Corporation (en) » en 1969. Le terme mécatronique est apparu officiellement en France dans le Larousse 2005.
La norme NF E 01-010 (2008) définit la mécatronique comme une « démarche visant l’intégration en synergie de la mécanique, l’électronique, l’automatique et l’informatique dans la conception et la fabrication d’un produit en vue d’augmenter et/ou d’optimiser sa fonctionnalité »

Nota bene : articles détaillés :
– Logiciel = instructions et données pour une machine.
– Contrôle = aptitude à diriger ou supprimer le changement.
– Électronique = branche de la physique appliquée aux usages de l’électricité
– Mécanique = branche de la physique appliquée à l’étude des mouvements, déformations et équilibres des systèmes physiques.
– CFAO = Conception et fabrication assistées par ordinateur.
– Contrôle numérique = Système numérique de contrôle-commande.
– Circuits de contrôle = Système analogique de contrôle-commande.
– Électromécanique = association de l’électronique et de la mécanique
– Simulation = Simulation de phénomènes
– Micro-contrôleurs = circuit intégré à haut degré d’intégration
– Capteur = convertisseur d’une grandeur physique
– Modélisation des systèmes = Conception assistée par ordinateur#Mécanique
Description
L’ingénierie de tels systèmes mécatroniques nécessite la conception simultanée et pluri-disciplinaire de 4 sous-systèmes :
- une partie opérative (squelette et muscle du système à dominante Mécanique et Électromécanique) ;
- une partie commande (intelligence embarquée du système à dominante Électronique et Informatique Temps Réel) ;
- une partie interface Machine/Machine (échange de données entre deux systèmes distincts à dominante Électronique et Informatique de Réseaux) ;
- une partie interface Homme/Machine (forme géométrique et dialogue du système à dominante Ergonomique et Esthétique).
Une approche globale permet aussi de réduire les coûts, d’augmenter la fiabilité et la modularité.
La fiabilité
(La fiabilité est l’étude des défaillances des systèmes — essentiellement des produits manufacturés (mécanique, électronique, génie civil…) —, et en particulier d’un point de vue statistique.
Un système est dit « fiable » lorsque la probabilité de remplir sa mission sur une durée donnée correspond à celle spécifiée dans le cahier des charges)
Les dispositifs mécatroniques sont utilisés pour piloter des systèmes et rétroagir pour s’adapter aux conditions variables de fonctionnement, pour surveiller leur état (sollicitation, fatigue…), réaliser leur maintenance… Ce domaine très vaste reste complexe (accès aux informations, compétences en électronique et mécanique, répartition des fonctions, fiabilité et sécurité…). Il nécessite des moyens importants et entraîne des coûts élevés.
L’intégration de ces techniques a débuté dans l’aéronautique, suivie par les transports et actuellement l’automobile. Dans le futur, ce thème intéressera des secteurs de la mécanique comme les machines, le levage, etc. Les applications industrielles devront à terme faire partie du savoir-faire spécifique de l’entreprise, l’intégration des capteurs restant toujours le problème du mécanicien. La tendance est au partenariat technologique ; seuls certains grands ensembliers considèrent cette technologie comme totalement stratégique.
Bien que la fiabilité et la sécurité de l’électronique se soient améliorées, une réflexion globale sur le système ou le processus est nécessaire avant d’intégrer la technologie et les spécificités « métier ». Les appareils et systèmes doivent résister aux interférences électromagnétiques dans des environnements toujours plus perturbés et leur compatibilité électromagnétique doit être étudiée puis validée pour assurer la sécurité et la fiabilité du fonctionnement. Des méthodes de vérification du logiciel système ou utilisateur doivent être développées pour s’assurer que la commande répond bien aux besoins et n’entraîne pas des situations dangereuses.
Les outils de simulation de systèmes et d’automatismes font partie des solutions permettant de définir une stratégie de commande indépendante des défaillances mécaniques, électroniques ou de l’utilisateur.
Les développements futurs se dirigent vers les réseaux neuronaux et les boucles d’asservissement en logique floue.
Les contraintes de mise en œuvre
Transversalité
La mécatronique exige de penser les produits et les procédés de manière transverse. La mécatronique fait « éclater les murs », avec un pilotage matriciel. Le pilotage au plus haut niveau de l’entreprise est dans ce cadre essentiel, afin que les moyens alloués correspondent aux besoins à mettre en œuvre.
Le chef de projet doit maîtriser les différents domaines, et non être un expert dans l’une des technologies mécatronique : Il faut absolument éviter de regarder le projet avec un œil de mécanicien ou d’électronicien. Le pilotage est ici, plus qu’ailleurs, le rôle d’un chef d’orchestre et non d’un virtuose.
Non-séquentialité
La conception ne doit plus se faire de manière séquentielle : la démarche mécatronique nécessite de penser le produit dans son ensemble (tous les domaines de compétences à la fois) et non pas en séparant la partie mécanique, puis l’électronique, puis les capteurs-actionneurs puis l’informatique, au risque d’atteindre des surcoûts rédhibitoires.
Intégration
Les phases d’intégrations sont délicates, par exemple celle d’un montage électronique dans un atelier de mécanique (ou réciproquement). Il y a ainsi télescopage de domaines de maîtrise d’œuvre et de compétence, ce qui implique un travail qui se réalise en commun, pour obtenir finalement non pas un élément purement mécanique, ou purement électronique, mais bien un ensemble qui combine les avantages des deux, et ne pouvant plus être séparé.
Finalités
Les finalités peuvent être la réduction de coûts, le développement de nouvelles fonctions clients ou des moyens de se protéger de la contrefaçon. Elle ne doit pas être seulement l’électronisation de fonctions.
Un produit mécatronique a des potentialités importantes de par son « intelligence embarquée ». La création d’options peut se faire à coût marginal.
Applications
Comme exemples de systèmes mécatroniques, on peut citer :
- un véhicule automobile moderne ;
- un avion de chasse ;
- l’ABS, l’ESP ;
- la direction assistée ;
- une machine-outil à commande numérique ;
- l’autofocus ;
- les disques durs ;
- les roulements à billes instrumentés ;
- les machines à laver « intelligentes » ;
- la dronautique ;
- les pompes (à vide) turbomoléculaires sur paliers magnétiques, etc.
Les projets industriels
THESAME
THESAME est une association française qui fédère les entreprises, les formations et la recherche dans le domaine de la mécatronique. Plus de 1000 contributeurs animent cette communauté1.
Tous les ans sont ainsi organisées les rencontres européennes de la mécatronique (EMM) : Annecy en 2003 et 2005, Paris en 2004, Saint-Étienne en 2006 et le Grand-Bornand en 2007.
L’édition 2008, construite comme un véritable « Davos de la mécatronique » s’est tenue les 20 et 21 mai à nouveau au Grand-Bornand. Le thème : Europe Japon le défi mécatronique avec la collaboration des pôles de compétitivité Moveo, Arve Industries et de clusters automobile.
L’EMM 2009 s’est déroulée les 24 et 25 juin 2009 à la Cité internationale universitaire de Paris.
EMM2010 a eu pour thème mécatronique et industrie, et EMM2011, organisé avec Innorobo était consacré aux liens entre robotique et mécatronique
EMM2012 (Grand-Bornand 6 et 7 juin) est la dixième édition ; elle a pour thème le développement durable et l’efficacité énergétique dans 4 secteurs : habitat, industrie, transport et nouvelles énergies. Le titre de la manifestation :« la mécatronique passe au vert ».
En 2012, Thésame a lancé un site collaboratif, totalement consacré à la mécatronique http://www.mecatronique.fr.
Eumecha-pro
Le projet européen Eumecha-pro s’est donné en particulier pour tâche d’élaborer les feuilles de route (roadmaps) pour l’industrie et la recherche. Les roadmaps industrielles vont fournir une vue structurée sur les attentes et des besoins de l’industrie et seront établies pour les différents secteurs d’équipement de production. Les roadmaps pour la recherche refléteront les visions et les capacités de la recherche européenne en mécatronique. À l’issue de ce travail, les roadmaps recherche et industrie seront intégrées dans une vision commune.
Les technologies émergentes et les approches de conception intégrées issues des roadmaps recherche seront confrontées aux besoins de l’industrie et indiqueront les nouvelles opportunités de développement industriel. D’autre part, les besoins industriels viendront alimenter la recherche pour qu’elle puisse répondre au mieux aux besoins du marché. En outre, les roadmaps recherche fourniront un cadre commun pour une coordination efficace des ressources de la recherche en Europe.
Eumecha-pro va promouvoir et diffuser la pratique dans l’industrie du nouveau paradigme qu’est la conception mécatronique. Les meilleures pratiques en conception mécatronique seront identifiées, promues et diffusées à travers des workshops à vocation industrielle.
Eumecha-pro va renforcer la structure et le cadre éducatif pour former les ingénieurs en mécatronique dont l’industrie a besoin. Les besoins et les approches en formation Mécatronique seront analysées, avec pour résultat une vision européenne sur la façon dont la formation peut être améliorée avec une bien meilleure cohérence au niveau européen.
La diffusion et l’échange d’information se fera en particulier sur internet, par des publications ainsi que par des réunions de réseau. En outre, Eumecha-pro va grandement améliorer la coordination des différents mécanismes de financement de la R&D, en particulier en insérant ses « déliverables » dans la plateforme « Eureka Factory » et l’initiative « MANUFUTURE » de la Commission européenne2.
Groupement Mécatronique Languedoc Roussillon (GMLR)
GMLR3 est le premier groupement régional d’entreprises du secteur mécanique et électronique en Languedoc-Roussillon. Créé en 2009 par 45 chefs d’entreprises, ce groupement est une association au service de l’ensemble de la filière mécanique et électronique de la région. Son ambition principale est de favoriser le développement et la croissance de l’ensemble de la filière, tant sur le plan de la compétitivité que sur celui de la performance commerciale des entreprises.
Automatique
L’automatique est une science qui traite de la modélisation, de l’analyse, de l’identification et de la commande des systèmes dynamiques. Elle inclut la cybernétique au sens étymologique du terme, et a pour fondements théoriques les mathématiques, la théorie du signal et l’informatique théorique. L’automatique permet de commander un système en respectant un cahier des charges (rapidité, précision, stabilité…).
Les professionnels en automatique se nomment automaticiens. Les objets que l’automatique permet de concevoir pour procéder à l’automatisation d’un système (automates, régulateurs, etc.) s’appellent les automatismes ou les organes de contrôle-commande d’un système piloté.
Un exemple simple d’automatisme est celui du régulateur de vitesse d’une automobile : il permet de maintenir le véhicule à une vitesse constante prédéterminée par le conducteur, indépendamment des perturbations (pente de la route, résistance du vent, etc.). James Clerk Maxwell, dans son article « On Governors »1 (1868), définissait ainsi le système de régulation qu’il avait inventé : « A governor is a part of a machine by means of which the velocity of the machine is kept nearly uniform, notwithstanding variations in the driving-power or the resistance ». Cette définition est une excellente introduction à l’automatique.
